友人からRapiroをもらった。
一通り遊んで満足したのか、組み立て済みのRapiroをぽーんとくれた。
気前のいい話である。
もらったものの、どんなものなのかよくわからなかった。
とりえあずRapiroが何者なのかを調べて動かしてみた。
Rapiroとは
もらったのは組み立て済みのRapiroだったが、本来は自分で組み立てるロボットキット。
Arduino互換の基盤が付属されているので、組み立てればすぐに歩いたり手を振ったりすることができる。
また、Raspberry Piを搭載できるように作られている。
Raspberry Piを搭載することで、インターネットにつないだりカメラモジュールをつないだり等、機能拡張することができる。
公式サイト:https://www.rapiro.com/ja/
事前準備
Arduino IDEをインストール
Arduino IDEのインストーラーをダウンロードしてインストール。
Rapiro基板のドライバをインストール
Rapiro基盤のドライバをダウンロードしてインストール。
詳しくはこちら。
動かしてみる
スケッチの書き込み
Rapiro用のスケッチをダウンロード。
Arduino IDEで開く。
Rapiroの背面にあるUSBポートからPCに接続。
Arduino IDEの「ツール」→ボードを「Arduino Uno」にする。
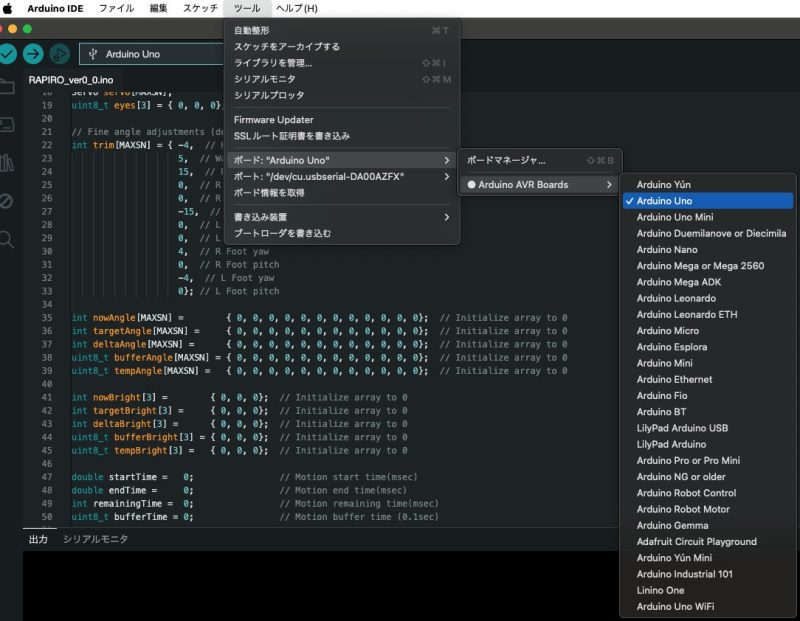
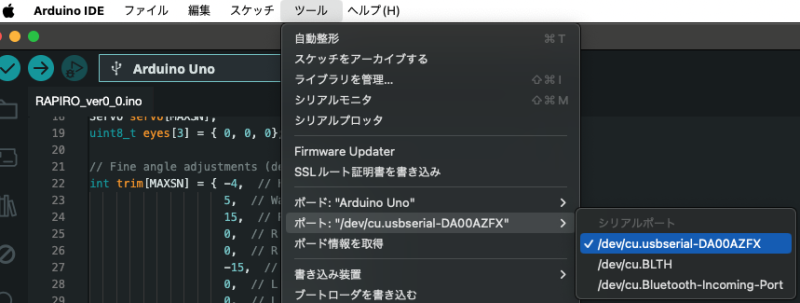
Arduino IDEの「ツール」→シリアルポートを選択。
Macの場合は「/dev/cu.usbserial〜」を選択。
環境によって表示が変わるので、わからない場合は一旦Rapiroを外した状態で確認をして、接続をしたときに増えたシリアルポートを選択すればよい。
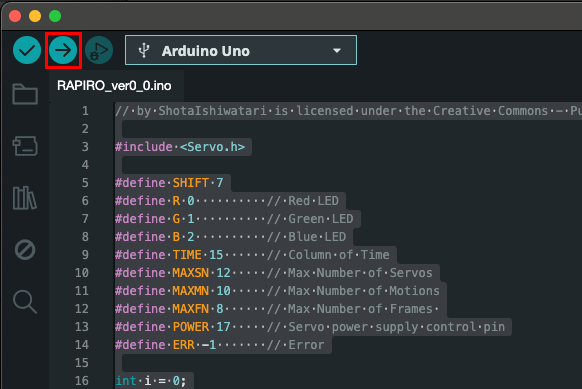
右上の書き込みボタンをクリックして、Rapiroに書き込む。
姿勢の調整
電源が入った状態でサーボモーターから「ジー」と大きなノイズが発生する場合は、足の角度がまっすぐになっていないので起動時の姿勢を調整する。
int trim[MAXSN]の配列の値で起動時の姿勢の調整をする。
きれいな直立姿勢になるように足以外も調整する。
まずは正面から見てまっすぐになるようにざっくりと調整を行い、そこからノイズが小さくなるまで1ずつ微調整を行う。
// Fine angle adjustments (degrees)
int trim[MAXSN] = { 0, // Head yaw
0, // Waist yaw
0, // R Sholder roll
0, // R Sholder pitch
0, // R Hand grip
0, // L Sholder roll
0, // L Sholder pitch
0, // L Hand grip
0, // R Foot yaw
0, // R Foot pitch
0, // L Foot yaw
0}; // L Foot pitch丸パンダ研究所のRapiroの調整後の値。
// Fine angle adjustments (degrees)
int trim[MAXSN] = { -4, // Head yaw
5, // Waist yaw
15, // R Sholder roll
0, // R Sholder pitch
0, // R Hand grip
-15, // L Sholder roll
0, // L Sholder pitch
0, // L Hand grip
4, // R Foot yaw
0, // R Foot pitch
-4, // L Foot yaw
0}; // L Foot pitchシリアルコマンドを送信
シリアルモニタの通信速度を57600baudにする。

シリアルコマンドを送信。

| コマンド | 動作 | 目の色 |
|---|---|---|
| #M0 | 停止 | 青 |
| #M1 | 前進 | 青 |
| #M2 | 後退 | 青 |
| #M3 | 左に曲がる | 青 |
| #M4 | 右に曲がる | 青 |
| #M5 | 両手を振る | 緑 |
| #M6 | 右手を振る | 黄 |
| #M7 | 両手を握る | 青 |
| #M8 | 左手を振る | 赤 |
| #M9 | 右手を伸ばす | 青 |
無事に動かすことができた。